La electrónica es la rama de la física y especialización de la ingeniería, que estudia y emplea sistemas cuyo funcionamiento se basa en la conducción y el control del flujo de los electrones u otras partículas cargadas eléctricamente.
Dentro de la electrónica se encuentran dos tipos:
Dentro de la electrónica se encuentran dos tipos:
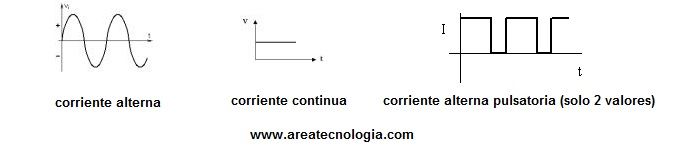
-Analógica. Se trata de corrientes y tensiones que varían continuamente de valor en el transcurso del tiempo, como la corriente alterna (ca) o de valores que siempre tienen el mismo valor de tensión y de intensidad, como la corriente continua (cc).
-Digital. Se trata de valores de corrientes y tensiones eléctricas que solo pueden poseer dos estados en el transcurso del tiempo. Hay o no hay corriente o tensión pero cuando hay siempre es la misma y cuando no hay siempre es de valor 0.
Variable Binaria. Es toda variable que solo puede tomar 2 valores, dos dígitos (dígitos=digital) que corresponden a dos estados distintos. Estas variables las usamos para poner el estado en el que se encuentra un elemento de maniobra o entrada (por ejemplo un interruptor o un pulsador) y el de un receptor (por ejemplo una lámpara o un motor).
- Receptores o elementos de Salida: encendida (estado 1) o apagada (estado 0). Por ejemplo: lámparas, motores, timbres, etc.
- Elementos de entrada: accionado (estado 1) y sin accionar (estado 0). Por ejemplo: interruptor, pulsador, sensor, etc.
ÁLGEBRA BOOLEANA
Operaciones Lógicas
Son las operaciones matemáticas que se usan en el sistema binario, sistema de numeración que solo usa el 0 y el 1.
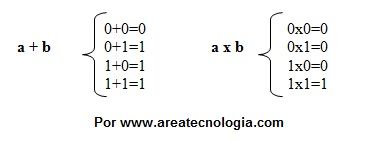
TABLA DE VERDAD
Una tabla de verdad, o tabla de valores de verdad, es una tabla que muestra el valor de verdad de una proposición compuesta, para cada combinación de verdad que se pueda asignar.
Una aplicación importante de las tablas de verdad procede del hecho de que, interpretando los valores lógicos de verdad como 1 y 0 (lógica positiva) en el sentido que
- valor "1" permite el paso de corriente eléctrica; y
- valor "0" corta el paso de dicha corriente.
Los valores de entrada o no entrada de corriente a través de un diodo pueden producir una salida 0 ó 1 según las condiciones definidas como función.

PUERTAS LÓGICAS
Son componentes electrónicos representados por un símbolo con una o dos entradas (pueden ser de mas) y una sola salida que realizan una función (ecuación con variables binarias), y que toman unos valores de salida en función de los que tenga en los de entrada.
Las puertas lógicas también representan un circuito eléctrico y tienen cada una su propia tabla de la verdad, en la que vienen representados todos los posibles valores de entrada que puede tener y los que les corresponden de salida según su función.
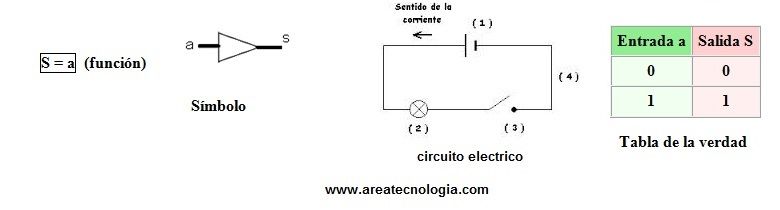
-Función Igualdad
La entrada es igual a la salida.
Como vemos la función que representa esta puerta es que el valor de la salida (motor o lámpara) es siempre igual al del estado del de entrada (pulsador o interruptor). En el esquema vemos que se cumple. El pulsador en estado 0 (sin pulsar) la lámpara está apagada, o lo que es lo mismo en estado también 0. Si ahora pulsamos el pulsador, estado 1, la lámpara se enciende y pasará también al estado 1. La tabla de la verdad nos da los estado de la salida para los posibles estados de entrada, que este caso solo son dos 0 o 1.
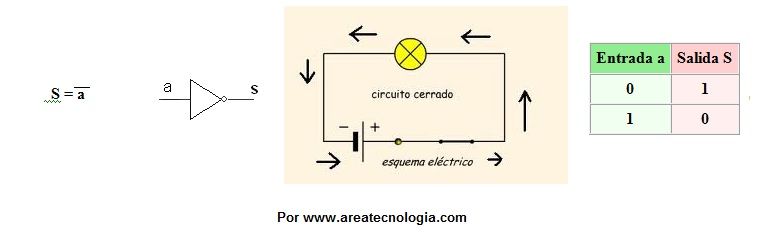
-Puera NOT (función negación)
La función nos dice que el estado de la salida S, es el de la entrada a pero invertida, es decir la salida es lo contrario de la entrada. si a es 0, a invertida será 1. Si a es 1 a invertida será 0. Como vemos el pulsador está en estado 0 cerrado (sin pulsar) y la lámpara en estado 0 del pulsador estará encendida, estado 1. Cuando pulsamos el pulsador (estado 1) la lámpara se apaga y estará en estado 0.
Todas las puertas lógicas que se invierten a la salida llevan en su símbolo un círculo al extremo.
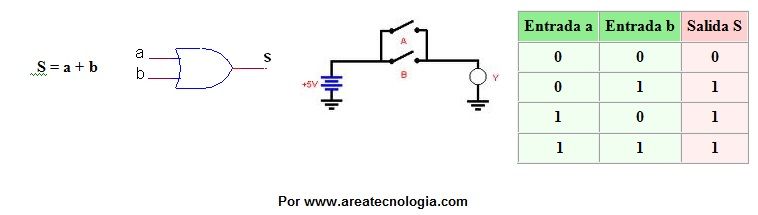
-Puerta OR (función suma)
En este caso hay dos elementos de entrada (dos pulsadores). Para que la lámpara esté encendida (estado 1) debe de estar un pulsador cualquiera pulsado (estado 1) o los dos.
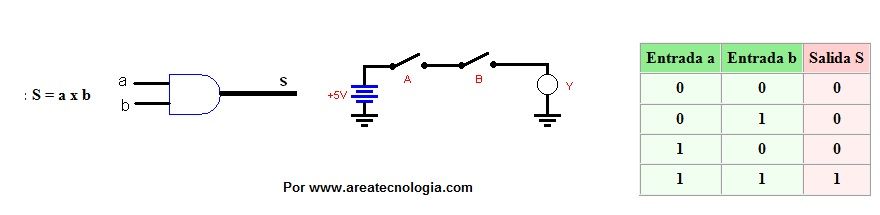
-Puerta AND (función multiplicación)
En este caso para que la lámpara este encendida es necesario que estén pulsador (estado 1) los dos pulsadores a la vez.
Estas son las 4 compuertas básicas con las que se podría hacer una gran cantidad de circuitos electrónicos. Pero es necesario conocer otras puertas lógicas para simplificarlos.
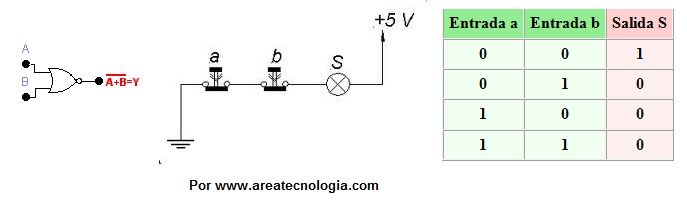
-Puerta NOR (función suma invertida)
La función viene representada en el propio símbolo. Además a la salida le llamamos Y, se pude llamar con cualquier letra en mayúsculas. Las entradas son A y B pero invertidas. Solo hay posibilidad de salida 1 cuando los dos pulsadores, cerrados en reposo, están sin accionar (estado 1).
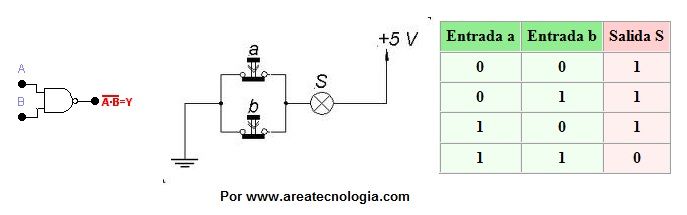
-Puerta NAND (función producto invertido)
Como están en paralelo los dos pulsadores sin accionar (estado 0) la lámpara estará encendida (estado 1) y aunque se pulse y se abra un pulsador la lámpara seguirá encendida. Solo en el caso de que se pulsen los dos pulsadores (los dos abiertos) y estén en estado 1 la lámpara se apagará (estado 0).
CIRCUITOS INTEGRADOS DIGITALES
Los circuitos integrados son la base fundamental del desarrollo de la electrónica en la actualidad, debido a la tendencia a facilitar y economizar las tareas del hombre. Los circuitos cuyos componentes realizan operaciones análogas a las que indican los operadores lógicos se llaman "Circuitos Lógicos" o "circuitos digitales". Los Circuitos Lógicos están compuestos por elementos digitales como la compuerta AND (Y), compuerta OR (O), compuerta NOT (NO) y otras combinaciones muy complejas de los circuitos antes mencionados.
Tipos de Elementos Digitales
Estas combinaciones (ya mencionadas) dan lugar a otros tipos de elementos digitales. Aquí hay un listado de estos. · Compuerta NAND (No Y) · Compuerta NOR (No O) · Compuerta OR exclusiva (O exclusiva) · Mutiplexores o multiplexadores · Demultiplexores o demultiplexadores · Decodificadores · Codificadores · Memorias · flip-flops · Micro Procesadores · Micro Controladores

-http://www.areatecnologia.com/electronica/electronica-digital.html
-https://es.wikipedia.org/wiki/Tabla_de_verdad
-https://ericmat.wordpress.com/2010/06/17/proposiciones-conjunciones-disyunciones-implicaciones/
http://www.ecured.cu/Circuitos_integrados_digitales
http://www.ecured.cu/Archivo:Circuitosintegradosdigitales.jpg
http://www.ladelec.com/imagenes/aplic_mux.gif
https://es.wikipedia.org/wiki/Electr%C3%B3nica
-https://es.wikipedia.org/wiki/Tabla_de_verdad
-https://ericmat.wordpress.com/2010/06/17/proposiciones-conjunciones-disyunciones-implicaciones/
http://www.ecured.cu/Circuitos_integrados_digitales
http://www.ecured.cu/Archivo:Circuitosintegradosdigitales.jpg
http://www.ladelec.com/imagenes/aplic_mux.gif
https://es.wikipedia.org/wiki/Electr%C3%B3nica