
lunes, 25 de enero de 2016
martes, 24 de noviembre de 2015
Electrónica Digital y Compuertas Lógicas
La electrónica es la rama de la física y especialización de la ingeniería, que estudia y emplea sistemas cuyo funcionamiento se basa en la conducción y el control del flujo de los electrones u otras partículas cargadas eléctricamente.
Dentro de la electrónica se encuentran dos tipos:
Dentro de la electrónica se encuentran dos tipos:
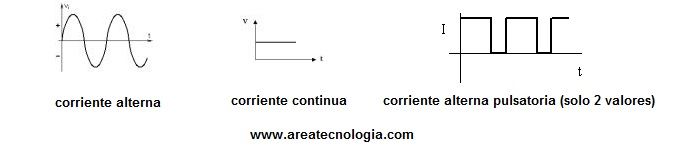
-Analógica. Se trata de corrientes y tensiones que varían continuamente de valor en el transcurso del tiempo, como la corriente alterna (ca) o de valores que siempre tienen el mismo valor de tensión y de intensidad, como la corriente continua (cc).
-Digital. Se trata de valores de corrientes y tensiones eléctricas que solo pueden poseer dos estados en el transcurso del tiempo. Hay o no hay corriente o tensión pero cuando hay siempre es la misma y cuando no hay siempre es de valor 0.
Variable Binaria. Es toda variable que solo puede tomar 2 valores, dos dígitos (dígitos=digital) que corresponden a dos estados distintos. Estas variables las usamos para poner el estado en el que se encuentra un elemento de maniobra o entrada (por ejemplo un interruptor o un pulsador) y el de un receptor (por ejemplo una lámpara o un motor).
- Receptores o elementos de Salida: encendida (estado 1) o apagada (estado 0). Por ejemplo: lámparas, motores, timbres, etc.
- Elementos de entrada: accionado (estado 1) y sin accionar (estado 0). Por ejemplo: interruptor, pulsador, sensor, etc.
ÁLGEBRA BOOLEANA
Operaciones Lógicas
Son las operaciones matemáticas que se usan en el sistema binario, sistema de numeración que solo usa el 0 y el 1.
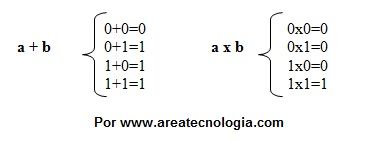
TABLA DE VERDAD
Una tabla de verdad, o tabla de valores de verdad, es una tabla que muestra el valor de verdad de una proposición compuesta, para cada combinación de verdad que se pueda asignar.
Una aplicación importante de las tablas de verdad procede del hecho de que, interpretando los valores lógicos de verdad como 1 y 0 (lógica positiva) en el sentido que
- valor "1" permite el paso de corriente eléctrica; y
- valor "0" corta el paso de dicha corriente.
Los valores de entrada o no entrada de corriente a través de un diodo pueden producir una salida 0 ó 1 según las condiciones definidas como función.

PUERTAS LÓGICAS
Son componentes electrónicos representados por un símbolo con una o dos entradas (pueden ser de mas) y una sola salida que realizan una función (ecuación con variables binarias), y que toman unos valores de salida en función de los que tenga en los de entrada.
Las puertas lógicas también representan un circuito eléctrico y tienen cada una su propia tabla de la verdad, en la que vienen representados todos los posibles valores de entrada que puede tener y los que les corresponden de salida según su función.
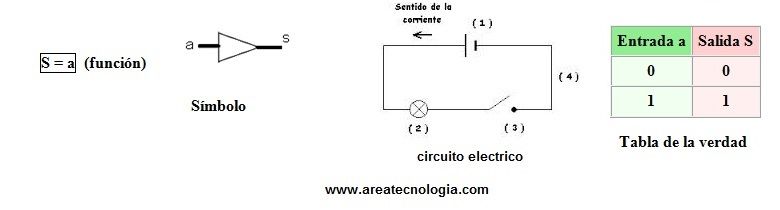
-Función Igualdad
La entrada es igual a la salida.
Como vemos la función que representa esta puerta es que el valor de la salida (motor o lámpara) es siempre igual al del estado del de entrada (pulsador o interruptor). En el esquema vemos que se cumple. El pulsador en estado 0 (sin pulsar) la lámpara está apagada, o lo que es lo mismo en estado también 0. Si ahora pulsamos el pulsador, estado 1, la lámpara se enciende y pasará también al estado 1. La tabla de la verdad nos da los estado de la salida para los posibles estados de entrada, que este caso solo son dos 0 o 1.
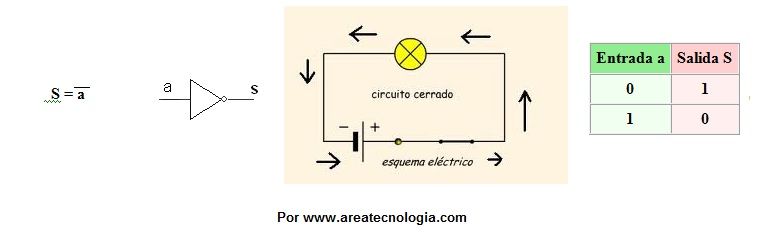
-Puera NOT (función negación)
La función nos dice que el estado de la salida S, es el de la entrada a pero invertida, es decir la salida es lo contrario de la entrada. si a es 0, a invertida será 1. Si a es 1 a invertida será 0. Como vemos el pulsador está en estado 0 cerrado (sin pulsar) y la lámpara en estado 0 del pulsador estará encendida, estado 1. Cuando pulsamos el pulsador (estado 1) la lámpara se apaga y estará en estado 0.
Todas las puertas lógicas que se invierten a la salida llevan en su símbolo un círculo al extremo.
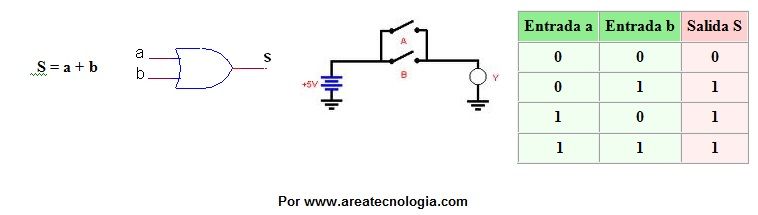
-Puerta OR (función suma)
En este caso hay dos elementos de entrada (dos pulsadores). Para que la lámpara esté encendida (estado 1) debe de estar un pulsador cualquiera pulsado (estado 1) o los dos.
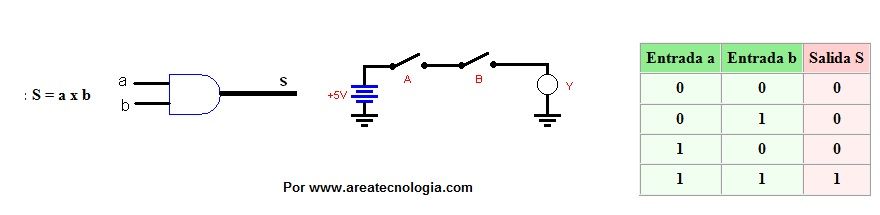
-Puerta AND (función multiplicación)
En este caso para que la lámpara este encendida es necesario que estén pulsador (estado 1) los dos pulsadores a la vez.
Estas son las 4 compuertas básicas con las que se podría hacer una gran cantidad de circuitos electrónicos. Pero es necesario conocer otras puertas lógicas para simplificarlos.
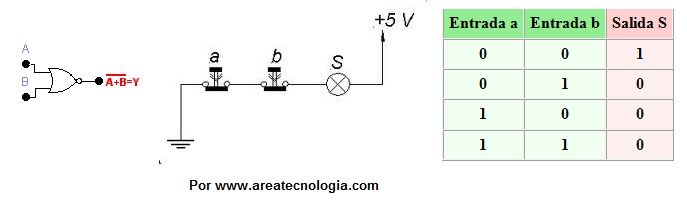
-Puerta NOR (función suma invertida)
La función viene representada en el propio símbolo. Además a la salida le llamamos Y, se pude llamar con cualquier letra en mayúsculas. Las entradas son A y B pero invertidas. Solo hay posibilidad de salida 1 cuando los dos pulsadores, cerrados en reposo, están sin accionar (estado 1).
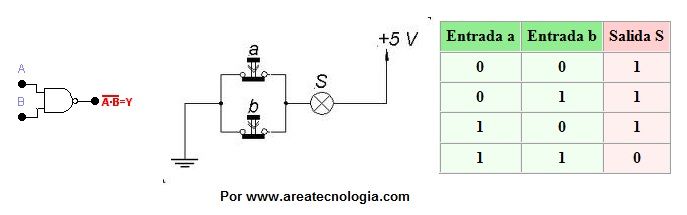
-Puerta NAND (función producto invertido)
Como están en paralelo los dos pulsadores sin accionar (estado 0) la lámpara estará encendida (estado 1) y aunque se pulse y se abra un pulsador la lámpara seguirá encendida. Solo en el caso de que se pulsen los dos pulsadores (los dos abiertos) y estén en estado 1 la lámpara se apagará (estado 0).
CIRCUITOS INTEGRADOS DIGITALES
Los circuitos integrados son la base fundamental del desarrollo de la electrónica en la actualidad, debido a la tendencia a facilitar y economizar las tareas del hombre. Los circuitos cuyos componentes realizan operaciones análogas a las que indican los operadores lógicos se llaman "Circuitos Lógicos" o "circuitos digitales". Los Circuitos Lógicos están compuestos por elementos digitales como la compuerta AND (Y), compuerta OR (O), compuerta NOT (NO) y otras combinaciones muy complejas de los circuitos antes mencionados.
Tipos de Elementos Digitales
Estas combinaciones (ya mencionadas) dan lugar a otros tipos de elementos digitales. Aquí hay un listado de estos. · Compuerta NAND (No Y) · Compuerta NOR (No O) · Compuerta OR exclusiva (O exclusiva) · Mutiplexores o multiplexadores · Demultiplexores o demultiplexadores · Decodificadores · Codificadores · Memorias · flip-flops · Micro Procesadores · Micro Controladores

-http://www.areatecnologia.com/electronica/electronica-digital.html
-https://es.wikipedia.org/wiki/Tabla_de_verdad
-https://ericmat.wordpress.com/2010/06/17/proposiciones-conjunciones-disyunciones-implicaciones/
http://www.ecured.cu/Circuitos_integrados_digitales
http://www.ecured.cu/Archivo:Circuitosintegradosdigitales.jpg
http://www.ladelec.com/imagenes/aplic_mux.gif
https://es.wikipedia.org/wiki/Electr%C3%B3nica
-https://es.wikipedia.org/wiki/Tabla_de_verdad
-https://ericmat.wordpress.com/2010/06/17/proposiciones-conjunciones-disyunciones-implicaciones/
http://www.ecured.cu/Circuitos_integrados_digitales
http://www.ecured.cu/Archivo:Circuitosintegradosdigitales.jpg
http://www.ladelec.com/imagenes/aplic_mux.gif
https://es.wikipedia.org/wiki/Electr%C3%B3nica
martes, 17 de noviembre de 2015
martes, 27 de octubre de 2015
Flex Ray
Índice de Temas
-Introducción
- Generalidades
- Características destacables
- Arquitectura
-Topologías
-Topologías básicas
* Linear passive bus
* Topologías con Active Stars
* Topologías híbridas
- Funcionamiento
* Reloj
* Bits en el bus
* Muestreo de bits
* Estructura
* Sincronización del reloj
- Referencias
Introducción
Un protocolo de comunicaciones es un sistema de reglas que permiten que dos o más entidades de un sistema de comunicación se comuniquen entre ellas para transmitir información por medio de cualquier tipo de variación de una magnitud física.
-Introducción
- Generalidades
- Características destacables
- Arquitectura
-Topologías
-Topologías básicas
* Linear passive bus
* Topologías con Active Stars
* Topologías híbridas
- Funcionamiento
* Reloj
* Bits en el bus
* Muestreo de bits
* Estructura
* Sincronización del reloj
- Referencias
Introducción
Un protocolo de comunicaciones es un sistema de reglas que permiten que dos o más entidades de un sistema de comunicación se comuniquen entre ellas para transmitir información por medio de cualquier tipo de variación de una magnitud física.
FlexRay es un nuevo protocolo de comunicaciones para buses de datos en el automóvil desarrollado por el consorcio FlexRay entre 2000 y 2009 que acelera la transmisión de datos entre los componentes del vehículo. Se considera más avanzado que el CAN y el MOST en lo relativo al precio y a las prestaciones. Permite a diferentes sistemas ser segura y precisamente enlazados permitiendo un manejo más confortable.
 |
Generalidades
La complejidad de los sistemas de asistencia al conductor está creciendo continuamente. Los nuevos sistemas de control de chasis y transmisión demandan velocidades de transferencia de datos extremadamente altas para funcionar efectivamente.
Para satisfacer esta creciente demanda, el consorcio FlexRay (conformado actualmente por Volkswagen, BMW, Daimler AG, General Motors, Robert Bosch GmbH, NXP Semiconductors y Freescale) desarrolló un nuevo sistema de bus que provee la seguridad, velocidad y calidad robusta demandada en aplicaciones automotrices.
Una ventaja clave de FlexRay es su alto rango de transferencia de datos de hasta 10 MBit por segundo, lo que es veinte veces más rápido que el sistema convencional de CAN Bus. Un segundo canal de comunicación de FlexRay actúa como respaldo, proporcionando redundancia para asegurar una excelente seguridad en todo momento. Si un canal falla en su correcto funcionamiento, el segundo permanece disponible. Para sistemas que no son críticos para la seguridad, un rango rápido de transferencia de datos puede lograrse por medio del uso de un solo canal.
Estas ventajas significan un mayor confort y mayor seguridad, permitiendo a los sistemas abordo comunicarse más rápida y seguramente.
Una ventaja clave de FlexRay es su alto rango de transferencia de datos de hasta 10 MBit por segundo, lo que es veinte veces más rápido que el sistema convencional de CAN Bus. Un segundo canal de comunicación de FlexRay actúa como respaldo, proporcionando redundancia para asegurar una excelente seguridad en todo momento. Si un canal falla en su correcto funcionamiento, el segundo permanece disponible. Para sistemas que no son críticos para la seguridad, un rango rápido de transferencia de datos puede lograrse por medio del uso de un solo canal.
Estas ventajas significan un mayor confort y mayor seguridad, permitiendo a los sistemas abordo comunicarse más rápida y seguramente.
 |
| BMW X5, primer vehículo comercial con tecnología FlexRay |
Características destacables
- Alta transmisión de datos (10 Mbits por segundo)
- Comportamiento estimulado por factores temporales
- Redundancia, seguridad y tolerancia de errores
Arquitectura
Un nodo Flexray está formado esencialmente por un microcontrolador, un periférico llamado Communication Controller, 2 transceivers y una fuente de alimentación. El microcontrolador es el propio de la ECU, el cual seguramente realiza otras funciones externas propias de la ECU y que cada cierto tiempo envía y recibe una trama de información al bus Flexray. Para ello se comunica con el Communication Controller (CC), que no es más que un periférico hardware que gestiona en todo momento el protocolo. Es decir, el microcontrolador no se encarga de la pila del protocolo, si no que lo gestiona todo el CC. Así pues, el CC se comunica a su vez con los transceivers que se encargan de transformar los datos lógicos a niveles eléctricos de Bus. Flexray dispone de 2 canales de comunicación, lo que requiere un transceiver para cada canal. Entre los diferentes bloques mencionados existen líneas optativas de señalización para determinadas situaciones.

Topologías
FlexRay permite un amplio abanico de topologías de red. El hecho de tener 2 canales independientes aporta además otro grado de libertad, pudiendo hacer para cada canal una configuración de nodos diferente.
En el caso que conectemos más nodos podemos hacerlo de manera pasiva o de manera activa. Otro elemento de red importante en FlexRay es el Active Star.
Como se puede observar, es posible asociar el concepto de Active Star (AS) al de un hub repetidor de bus.
Así pues combinando estos elementos entre sí y para cada canal obtenemos una flexibilidad substancial de crear diferentes topologías de red, ya sean básicas o híbridas. Para cada una de ellas existen algunas limitaciones que hay que cumplir para el correcto funcionamiento del bus tales como longitud máxima del bus, número máximo de stubs, número máximo de Active Stars, etc. Estos parámetros son típicos de todos los buses y tienen como causa principal los retardos que se producen en el bus.
Topologías básicas
-Linear passive bus
Es la topología más básica y una de las más usadas. Se puede apreciar como es posible que un nodo se conecte a los dos canales (por ejemplo en el caso que este nodo representara una función crítica del sistema) mientras que otros nodos se conectan a uno de los dos canales.
Sus limitaciones son:
-Topologías con Active Stars
Estas topologías hacen uso del elemento repetidor Active Star. Este elemento de bus es capaz de desacoplar eléctricamente las diferentes ramas a las cual está conectado, además de regenerar la señal aunque por otro lado introduce retardos. Se les puede dotar de cierta inteligencia consiguiendo un ruteado del mensaje, todo y que esto acumularía aún más retardo. También pueden desconectar una rama de la red si detectan un mal funcionamiento. Las limitaciones en este caso son:
-Topologías híbridas
Es posible crear una red a base de la unión de topologías básicas, todo y que no es muy recomendable ya que son topologías no estándar y poco probadas. En estos casos, las limitaciones son una mezcla de las topologías básicas que entrañe. La gran ventaja de estas topologías es su versatilidad.
Funcionamiento
Un nodo Flexray está formado esencialmente por un microcontrolador, un periférico llamado Communication Controller, 2 transceivers y una fuente de alimentación. El microcontrolador es el propio de la ECU, el cual seguramente realiza otras funciones externas propias de la ECU y que cada cierto tiempo envía y recibe una trama de información al bus Flexray. Para ello se comunica con el Communication Controller (CC), que no es más que un periférico hardware que gestiona en todo momento el protocolo. Es decir, el microcontrolador no se encarga de la pila del protocolo, si no que lo gestiona todo el CC. Así pues, el CC se comunica a su vez con los transceivers que se encargan de transformar los datos lógicos a niveles eléctricos de Bus. Flexray dispone de 2 canales de comunicación, lo que requiere un transceiver para cada canal. Entre los diferentes bloques mencionados existen líneas optativas de señalización para determinadas situaciones.

FlexRay permite un amplio abanico de topologías de red. El hecho de tener 2 canales independientes aporta además otro grado de libertad, pudiendo hacer para cada canal una configuración de nodos diferente.
 |
| Interconexión básica en FlexRay |
En el caso que conectemos más nodos podemos hacerlo de manera pasiva o de manera activa. Otro elemento de red importante en FlexRay es el Active Star.
 |
| Interconexión básica usando Active Stars |
Como se puede observar, es posible asociar el concepto de Active Star (AS) al de un hub repetidor de bus.
Así pues combinando estos elementos entre sí y para cada canal obtenemos una flexibilidad substancial de crear diferentes topologías de red, ya sean básicas o híbridas. Para cada una de ellas existen algunas limitaciones que hay que cumplir para el correcto funcionamiento del bus tales como longitud máxima del bus, número máximo de stubs, número máximo de Active Stars, etc. Estos parámetros son típicos de todos los buses y tienen como causa principal los retardos que se producen en el bus.
Topologías básicas
-Linear passive bus
Es la topología más básica y una de las más usadas. Se puede apreciar como es posible que un nodo se conecte a los dos canales (por ejemplo en el caso que este nodo representara una función crítica del sistema) mientras que otros nodos se conectan a uno de los dos canales.
Sus limitaciones son:
- Longitud de bus de 24m
- Número máximo de nodos conectados al bus mediante stubs: 22
- Mínima distancia entre stubs: 15cm
 |
| Topología Linear passive bus |
Cabe recalcar que existe una variante del Passive Bus que es la Passive Star la cual tiene las mismas limitaciones que el anterior. Eso sí se limita el uso de la Passive Star a un máximo de 1 ‘splice’ (empalme). La idea de la Passive Star es que todos los nodos se unen en un solo punto.
 |
| Topología Passive Star |
-Topologías con Active Stars
Estas topologías hacen uso del elemento repetidor Active Star. Este elemento de bus es capaz de desacoplar eléctricamente las diferentes ramas a las cual está conectado, además de regenerar la señal aunque por otro lado introduce retardos. Se les puede dotar de cierta inteligencia consiguiendo un ruteado del mensaje, todo y que esto acumularía aún más retardo. También pueden desconectar una rama de la red si detectan un mal funcionamiento. Las limitaciones en este caso son:
- Distancia máxima de un nodo al Active Star de 24m
- Longitud máxima entre dos AS de 24m
- Número máximo de AS en cascada: 2
 |
| Topología clásica con Active Stars |
 |
| Topología custom con Active Stars |
-Topologías híbridas
Es posible crear una red a base de la unión de topologías básicas, todo y que no es muy recomendable ya que son topologías no estándar y poco probadas. En estos casos, las limitaciones son una mezcla de las topologías básicas que entrañe. La gran ventaja de estas topologías es su versatilidad.
 |
| Topología híbrida |
Funcionamiento
Reloj
Como se mencionó anteriormente, el sistema FlexRay consiste de un bus y procesadores, que son los "cerebros" de las centralitas electrónicas. Cada centralita tiene un reloj independiente. La desviación del reloj no puede ser más de 0,15% del reloj de referencia, de forma que la diferencia de tics entre el reloj más lento y el más rápido no puede ser más de 0,3%. En otras palabras, 300 ciclos de una centralita emisora pueden ser 299 ó 301 de una centralita receptora. Los relojes se reajustan frecuentemente (cada 300 ciclos) para evitar problemas de desfase. Sus unidades de tiempo son:

- Microtick: Unidad de tiempo básica dependiente el oscilador local de cada nodo.
- Macrotick: Unidad de tiempo básica de la red. Todos los nodos tienen el mismo valor de Macrotick. Así pues si dos nodos tienen un oscilador local diferente tendrán diferente número de microticks por macrotick, pero al final el valor de macrotick será el mismo para todos.
- Cycle (ciclo): Es una unidad de tiempo propia de la red y es el tiempo del ciclo de comunicación medido en macroticks.

Bits en el Bus
En cada momento solo una centralita emite en el bus. Cada bit se mantiene en el bus durante 8 ciclos de reloj. Cada receptor contiene un búfer de los 5 últimos ciclos. Errores de transmisión en un único ciclo pueden afectar los resultados de los bits fronterizos, pero no en el centro de un ciclo de 8 bits.
Muestreo de bits
El valor del bit se muestrea en el centro de una región de 8 bits. Los errores se desplazan a los ciclos extremos, y el reloj se sincroniza frecuentemente para evitar desfases.
Muestreo de bits
El valor del bit se muestrea en el centro de una región de 8 bits. Los errores se desplazan a los ciclos extremos, y el reloj se sincroniza frecuentemente para evitar desfases.
| 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 0 |
Desviación de 2 ciclos en situaciones libres de errores.
| 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 0 |
Los errores en las cercanías del centro en un ciclo de 8 se cancelan.
| 0 | 0 | 0 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 0 |
Los errores junto a los bordes de un ciclo de 8 pueden afectar al bit fronterizo.
Estructura
Toda la comunicación se envía en estructuras soporte (o frames). Un mensaje consiste en bytes empaquetados de la siguiente forma:
- Señal de inicio de transmisión (Transmission Start Signal, TSS) - bit 0
- Señal de inicio de la estructura (Frame Start Signal, FSS) - bit 1
- "m" veces:
- Señal de inicio de byte 0 (BSS0) - bit 1
- Señal de inicio de byte 1 (BSS1) - bit 0
- 0-ésimo bit del i- byte
- 1. bit del i-ésimo byte
- 2. bit del i-ésimo byte
- ...
- 7. bit del i-ésimo byte
- Señal de fin de la estructura (FES) - bit 0
- Señal de fin de la transmisión (TES) - bit 1

Sincronización del reloj
Los relojes se vuelven a sincronizar cuando la señal votada cambia de 1 a 0, si el receptor estaba en el estado de espera o aguardando BSS1. De esta forma el reloj se sincroniza cuando la transmisión comienza y entre un BSS0 y un BSS1. Como la sincronización se hace con la señal deseada, puede que pequeños errores de transmisión que afecten a los bits fronterizos distorsionen la sincronización, pero no más de un ciclo. Ya que hay, como mucho, 88 ciclos entre sincronizaciones (BSS1, 8 bits del último byte, FES y TES - 11 bits de 8 ciclos cada uno), y el desfase del reloj no es más de 1 en 300 ciclos, el desfase puede distorsionar el reloj como mucho un ciclo. Pequeños errores de transmisión durante la recepción solo pueden afectar a los bits fronterizos. De forma que, en el peor de los casos, los dos bits centrales son correctos y con ello el valor muestreado es correcto. Aquí se muestra un ejemplo de un caso especialmente desfavorable - un error durante sincronización, un ciclo perdido debido a un desfase y un error de transmisión. Errores que se producen en el ejemplo:
- Debido a un error de un solo bit durante la sincronización, la sincronización se demoró un ciclo.
- El reloj receptor fue más lento que el reloj emisor, de forma que el receptor no recibió un ciclo (marcado como X). Esto no pasará de nuevo hasta la próxima sincronización gracias a los límites máximos permitidos para la demora de un reloj.
- Debido a un error de un solo bit durante la transmisión, un bit se votó mal junto al resultado.
| Señal a enviar | 1 | 0 | 1 | 0 | 1 | |||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Señal enviada | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 |
| En el bus | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 1 |
| Recibido | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | X | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 1 |
| votados | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | X | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | ||
Referencias
-https://es.wikipedia.org/wiki/Protocolo_de_comunicaciones
-https://es.wikipedia.org/wiki/FlexRay
-http://www.bmw.com/com/en/insights/technology/technology_guide/articles/flex_ray.html
-http://www.tomshardware.com/news/flexray-2007-bmw-x5,3263.html
http://upcommons.upc.edu/bitstream/handle/2099.1/6115/2.%20El%20protocolo%20Flexray.pdf?sequence=4&isAllowed=y
-https://www.youtube.com/watch?v=IRl3vzLyGP8
-http://www.tomshardware.com/news/flexray-2007-bmw-x5,3263.html
http://upcommons.upc.edu/bitstream/handle/2099.1/6115/2.%20El%20protocolo%20Flexray.pdf?sequence=4&isAllowed=y
-https://www.youtube.com/watch?v=IRl3vzLyGP8
viernes, 23 de octubre de 2015
viernes, 25 de septiembre de 2015
CAN Bus
Objetivo: Conocer el motivo de la existencia de CAN Bus, qué es, de qué está compuesto y cómo funciona. Para comprender su utilidad e importancia dentro de los sistemas de un automóvil.
ÍNDICE
-Origen
-Diferencias con la transmisión de datos convencional
-Transmisión de datos en serie (CAN Bus)
*Acoplamiento de unidades de control
*Electrónica de carrocería y de confort
*Comunicación móvil
-Acoplamiento de unidades de control
-Direccionamiento
-Prioridad de transmisión
-Formato de mensaje
-Anomalías y diagnóstico integrado
-Toma de datos del vehículo
-Resumen
-Mapa mental
-Referencias
Protocolo de comunicaciones CAN Bus
Origen
Conforme la industria automotriz se desarrollaba, la electrónica fue aumentando dentro de los vehículos para mejorar su rendimiento o confort. Al principio dichos componentes electrónicos podían contarse con los dedos de la mano y si necesitaban comunicarse unos con otros se hacía mediante cables directos (punto a punto).
Sin embargo, a medida que iba avanzando la tecnología, esto fue cambiando. Cada vez había más artefactos eléctricos en el auto y el cableado de los vehículos comenzó a hacerse muy complejo. Fue en ese momento que se decidió que había que definir un protocolo de comunicaciones para la automoción. De este modo nace el CAN Bus en el año 1982, desarrollado por la firma alemana Robert Bosch GmbH. Sus siglas en inglés hacen referencia a Controller Area Network y Bus es la topología que emplea para la comunicación.

Diferencias con la transmisión de datos convencional
Se caracteriza por el hecho de que a cada señal le está asignada una conducción individual. Las señales binarias solamente pueden transmitirse mediante dos estados "0" o "1" (código binario). Por ejemplo, para el compresor de aire acondicionado, los estados serían "conectado" o "desconectado".
Mediante relaciones de impulsos pueden transmitirse magnitudes variables continuamente como pudiera ser el estado del sensor del pedal del acelerador.
El incremento del intercambio de datos entre los componentes electrónicos en el vehículo ya no podía ser realizado adecuadamente con interfaces convencionales.

Transmisión de datos en serie (CAN Bus)
Los problemas en el intercambio de datos a través de interfaces convencionales pueden resolverse mediante las aplicación de sistemas de bus (vías colectoras de datos), como CAN. Bajo la condición de que las unidades de control electrónicas tengan una interfaz en serie CAN.
Existen tres campos de aplicación esenciales para el sistema CAN en el vehículo motorizado:
- Acoplamiento de unidades de control
- Electrónica de la carrocería y de confort
- Comunicación móvil
Acoplamiento de unidades de control: También llamado a las aplicaciones que funcionan en tiempo real como son las unidades de control del motor, el control del cambio y la regulación de la dinámica de marcha (ESP), sirven para la regulación del movimiento del vehículo.
Velocidad: Se caracterizan por unas velocidades de transmisión situadas entre 125 kBit/s y 1MBit/s (High-Speed-CAN).

Electrónica de carrocería y de confort: También llamado a las aplicaciones múltiples que se emplea para el control y la regulación de componentes en el sector de la electrónica de carrocería y confort. Por ejemplo, la regulación del aire de acondicionado, el cierre centralizado y el ajuste del asiento.
Velocidad: Las velocidades de transmisión se sitúan entre 10 KBit/s y 125 KBit/s (Low-speed-CAN).

Comunicación móvil: Las aplicaciones de comunicación móvil comunican componentes tales como el sistema de navegación GPS, el teléfono, o los equipos de audio con unidades centrales de indicación y mando. El objetivo consiste en unificar, en lo posible, las secuencias de operación, agrupar informaciones de estado y conseguir que la distracción del conductor sea mínima.
Velocidad: Las velocidades de transmisión de los datos se sitúan hasta los 125 kBit/s; no obstante, sin ser posible la transmisión directa de datos de audio o vídeo.

Acoplamiento de unidades de control
Las unidades de control están unidas como estaciones con igualdad de derechos, mediante una estructura de bus lineal. Esta estructura presenta la ventaja de que en caso de fallar una estación, el sistema bus continua estando plenamente a disposición de las demás estaciones. En comparación con otras disposiciones lógicas se reduce así esencialmente la probabilidad de un fallo total. En el caso de estructuras anulares o en estrella, el fallo de una estación o de la unidad central, conduce a un fallo total. Las velocidades de transmisión típicas están entre aproximadamente 125 kBit/s y 1Mbit/s. Las velocidades de transmisión deben ser tan altas para poder garantizar el comportamiento de tiempo real requerido.

Direccionamiento
El sistema bus CAN no asigna direcciones a las diversas estaciones, sino que asigna a cada "mensaje" un "identificador" fijo de 11 o 29 bits. Este identificador representa el contenido del mensaje (ejemplo: numero de revoluciones del motor). Una estación emplea únicamente aquellos datos cuyo identificador correspondiente esta almacenado en la lista de mensajes a recibir. Todos los demás datos se ignoran simplemente. El direccionamiento referido al contenido hace posible enviar una señal a varias estaciones, mandando a un sensor su señal, directamente o a través de una unidad de control, a la red bus que la distribuye entonces correspondientemente. Ademas es posible así realizar muchas variantes de equipamiento, porque pueden añadirse por ejemplo: estaciones adicionales a un sistema bus CAN ya existente.
Prioridad de transmisión
El identificador determina junto al contenido de datos simultáneamente la prioridad del mensaje al realizar la emisión. Una señal que varia rápidamente, como por ejemplo, el numero de revoluciones del motor, debe transmitirse también con gran rapidez, y recibe por lo tanto una prioridad mayor que una señal que varia relativamente lenta (ejemplo: temperatura del motor).
Cuando esta libre el bus puede comenzar cualquier estación a transmitir su mensaje. Si comienzan a emitir varias estaciones simultáneamente, se impone el mensaje de mayor prioridad, sin que se produzca una perdida de tiempo o de bit. Los emisores con mensajes de menor prioridad se convierten automáticamente en receptores y repiten su intento de emisión, en cuanto esta libre otra vez el bus.

Formato de mensaje
Para la transmisión en el bus se crea un marco de datos (Data Frame), cuya longitud abarca como máximo 130 bit (formato estándar) o 150 bit (formato ampliado). De esta forma queda asegurado que el tiempo de espera hasta la siguiente transmisión, posiblemente muy urgente, se mantenga siempre corto. El "Data Frame" consta de siete campos sucesivos:

Donde:
"Start of Frame" marca de comienzo de un mensaje y sincroniza todas las estaciones. "Arbitration Field" consta del identificador del mensaje y un bit de control adicional. Durante la transmisión de este campo, el emisor comprueba en cada bit si todavía esta autorizado para emitir o si esta emitiendo otra estación de mayor prioridad. El bit de control decide si el mensaje se trata de un "Data Frame" o de un "Remote Frame". "Control Field" contiene el código sobre la cantidad de bytes de datos en el "Data Field".
"Data Field" dispone de un contenido de información entre 0 y 8 bytes. Un mensaje de longitud 0 puede emplearse para la sincronización de procesos distribuidos.
"CRC Field" contiene una palabra de protección de marco para el reconocimiento de posibles anomalías de transmisión producidas.
"Ack Field" contiene una señal de confirmación de todos los receptores que han recibido el mensaje sin fallos.
"End of Frame" marca el final del mensaje.

Anomalías y diagnóstico integrado
El sistema bus CAN dispone de una serie de mecanismos de control para el reconocimiento de anomalías. Pertenece aquí, por ejemplo, la señal de seguridad en el "Data Frame" y el "Monitoring", en la que cada emisor recibe otra vez su propio mensaje, pudiendo reconocer entonces posibles divergencias. Si una estación registra una anomalía, emite entonces un "flag de error", que detiene la transmisión en curso. De esta forma se impide que otras estaciones reciban el mensaje erróneo. En caso de una estación defectuosa podría ocurrir sin embargo que todos los mensajes, es decir, también los mensajes sin errores, sean interrumpidos con un flag de error. Para evitar esto, el sistema bus CAN esta equipado con un mecanismo que puede distinguir entre anomalías ocasionales y anomalías permanentes y pueden localizar fallos de estación. Esto se produce mediante una evaluación estadística de las situaciones de error.
Toma de datos del vehículo
Los automóviles tienen un conector especial llamado OBD que suele encontrarse debajo del volante. Este conector permite acceder a los buses CAN del automóvil. Con un adaptador se puede conectar un ordenador, smartphone o similar y así conocer información del interior del vehículo.

Resumen
CAN Bus fue creado en 1982 por la firma alemana Robert Bosch GmbH para reducir el cableado y mejorar la transferencia de datos de dispositivos electrónicos en un automóvil. Los tres campos de aplicación esenciales son:
- Acoplamiento de unidades de control: para aplicaciones en tiempo real. Su velocidad está entre 125 kBit/s y 1MBit/s (High-Speed-CAN)
- Electrónica de la carrocería y de confort: que se emplea para el control y la regulación de componentes en el sector de la electrónica de carrocería y confort. Su velocidad se sitúa entre 10 KBit/s y 125 KBit/s (Low-speed-CAN).
- Comunicación móvil: comunican componentes tales como el sistema de navegación GPS, el teléfono, o los equipos de audio con unidades centrales de indicación y mando. Su velocidad se sitúa hasta los 125 kBit/s.
En comparación con otras disposiciones lógicas, se reduce esencialmente la probabilidad de un fallo total debido a que las unidades de control están unidas como estaciones con igualdad de derechos, mediante una estructura de bus lineal.
El sistema CAN Bus no asigna direcciones a las diversas estaciones, sino que asigna a cada "mensaje" un "identificador" fijo de 11 o 29 bits que representa el contenido del mensaje. Cada estación emplea únicamente aquellos datos cuyo identificador correspondiente esta almacenado en la lista de mensajes a recibir. Todos los demás datos se ignoran.
El identificador determina junto al contenido de datos simultáneamente la prioridad del mensaje al realizar la emisión. De acuerdo a la prioridad se envían los datos uno a la vez cuando está libre el bus.
Para la transmisión en el bus se crea un marco de datos (Data Frame), cuya longitud abarca como máximo 130 bit (formato estándar) o 150 bit (formato ampliado) que consta de siete campos sucesivos: Start of Frame, Arbitration Field, Control Field, Data Field, CRC Field, Ack Field y End of Frame.
Para reconocer anomalías, cada emisor recibe su propio mensaje. Si se presenta alguna se emite un "flag de error", que detiene la transmisión en curso. CAN Bus puede distinguir entre anomalías ocasionales y anomalías permanentes y puede localizar fallos de estación.
Mapa Mental

Referencias
-http://www.motorpasionfuturo.com/industria/can-bus-como-gestionar-toda-la-electronica-del-automovil
-http://www.aficionadosalamecanica.net/canbus.htm
-http://www.aa1car.com/library/can_systems.htm
-http://www.ocio.net/motor/que-es-el-esp/
-http://www.diariomotor.com/tecmovia/2013/04/20/que-consume-mas-aire-acondicionado-o-ventanillas-bajadas/
-http://revista.sansanos.cl/2011/08/usm-implementa-sistema-de-conectividad-wifi-en-vehiculos-institucionales/
jueves, 24 de septiembre de 2015
Suscribirse a:
Comentarios (Atom)